Our work on augmented reality-enhanced inspection just got accepted at the IEEE Multi-Conference on Systems and Control 2016.
Paper information:
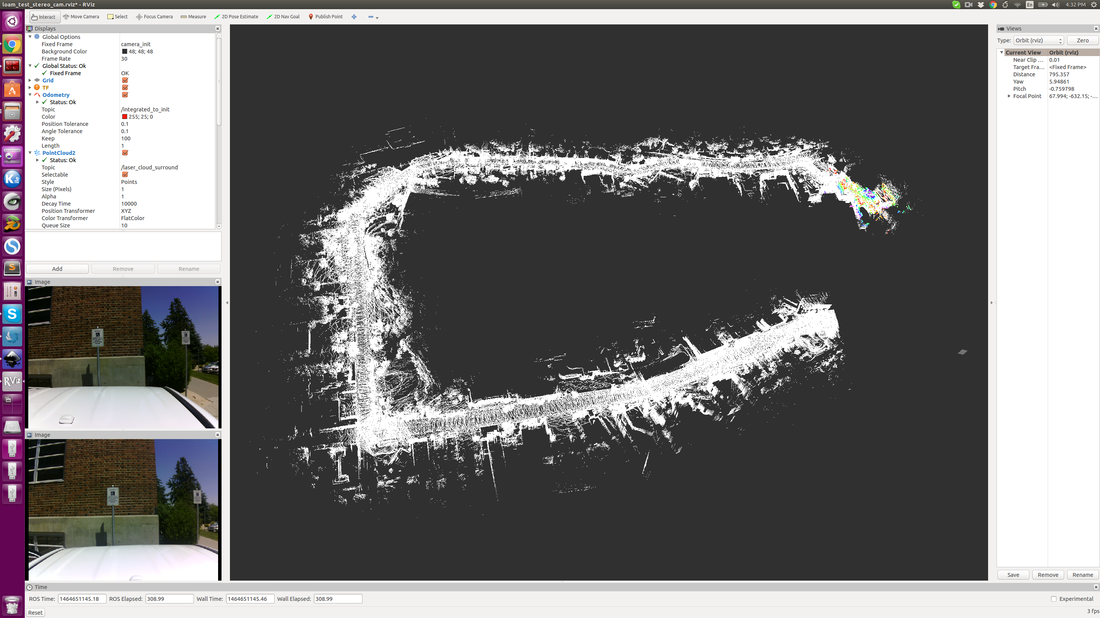
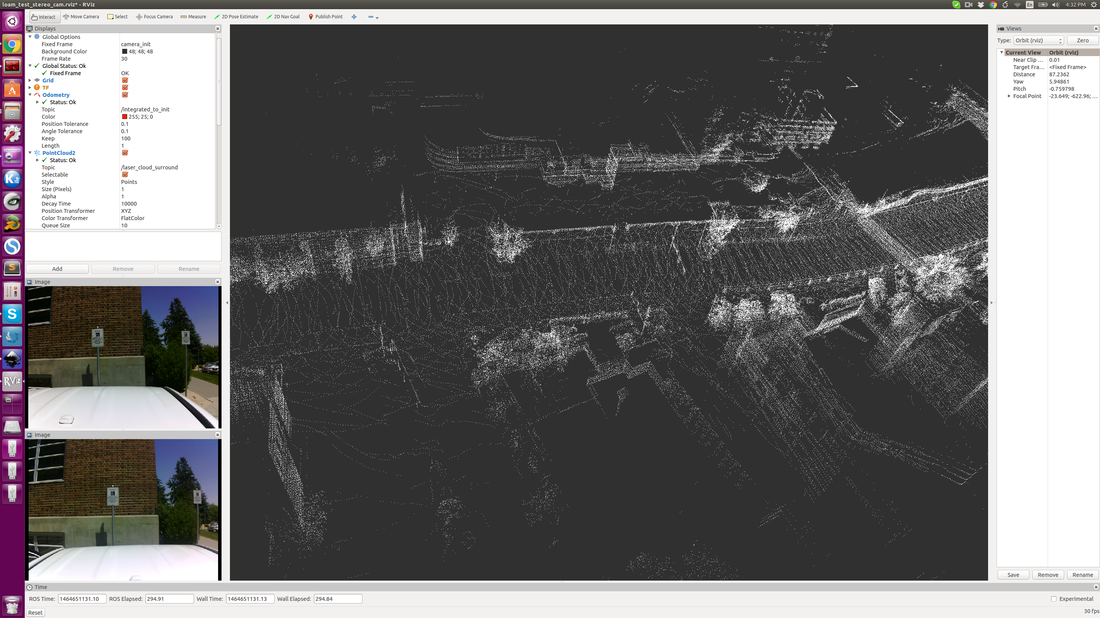
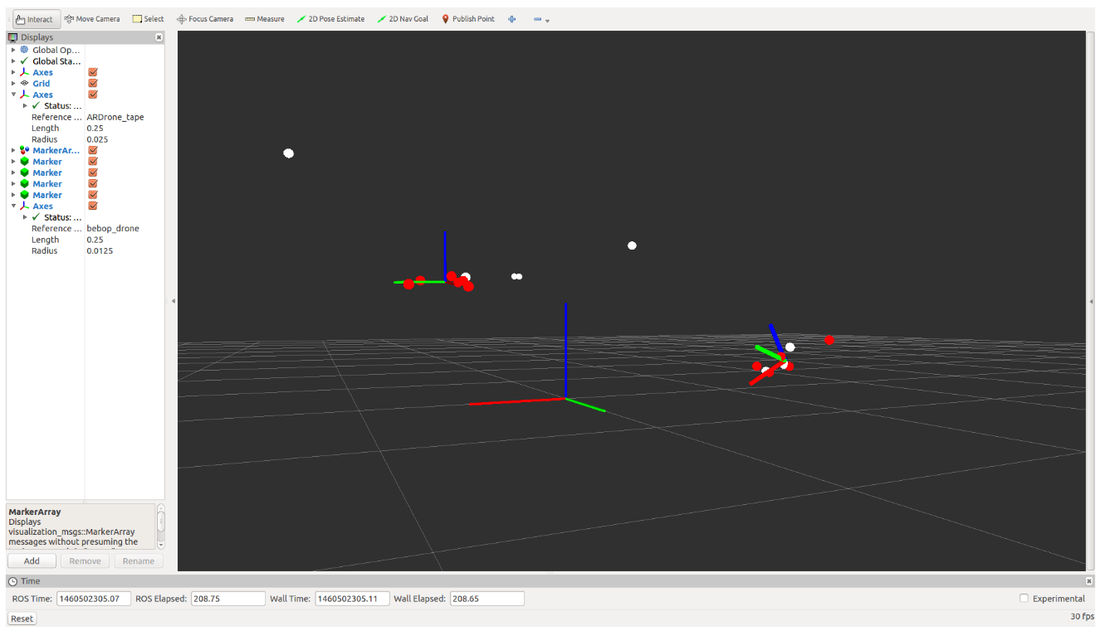
C. Papachristos, K. Alexis, "Augmented Reality–enhanced Structural Inspection using Aerial Robots", IEEE Multi-Conference on Systems and Control 2016 Buenos Aires, Argentina, September 19-22, 2016
Below our relevant video:
Paper information:
C. Papachristos, K. Alexis, "Augmented Reality–enhanced Structural Inspection using Aerial Robots", IEEE Multi-Conference on Systems and Control 2016 Buenos Aires, Argentina, September 19-22, 2016
Below our relevant video:




 RSS Feed
RSS Feed