
It was about time - although it took a while to initiate fixed-wing UAV research in a new place.
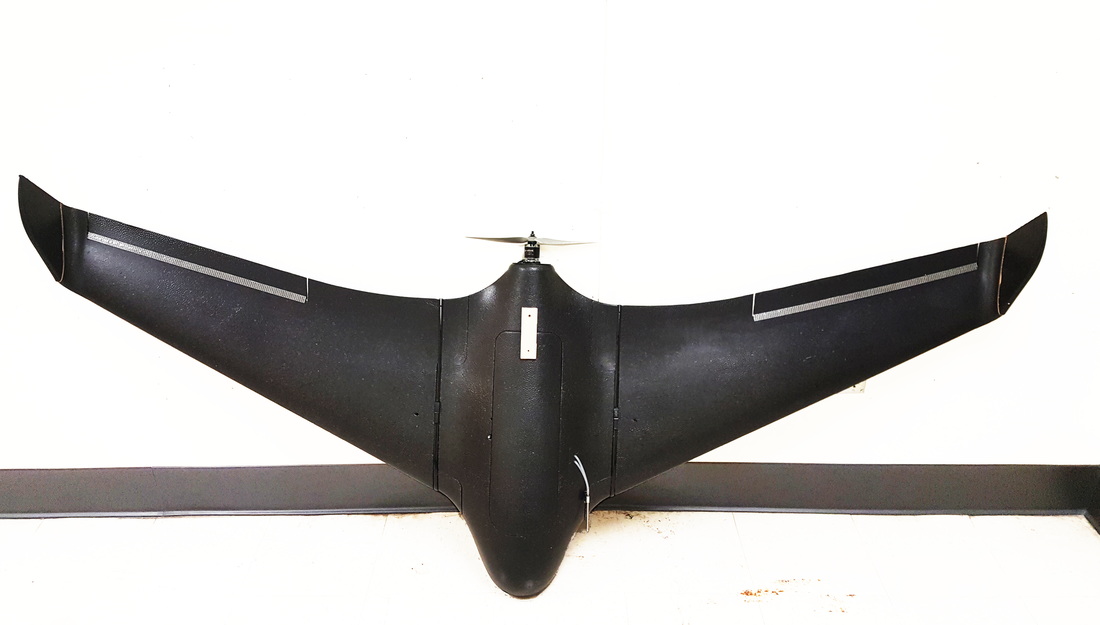
Through four talented undergraduate students (Murillo B, Brandon T, Jason R, Matt B) and a pilot (Phillip T) a platform for fixed-wing related research was developed. The system is designed around the Skywalker X8 platform (2.1m wingspan) and integrates a Pixhawk autopilot with IMU/Baro/GPS/Airspeed sensing), a high-level Intel i5 Processor and camera systems to further enable autonomy research.
This flight was not autonomous and the goal was to simply verify avionics, high level processing, telemetry and the overall vehicle behavior. But autonomy is on its way! Below some further photos and a video of this first short flight.
Through four talented undergraduate students (Murillo B, Brandon T, Jason R, Matt B) and a pilot (Phillip T) a platform for fixed-wing related research was developed. The system is designed around the Skywalker X8 platform (2.1m wingspan) and integrates a Pixhawk autopilot with IMU/Baro/GPS/Airspeed sensing), a high-level Intel i5 Processor and camera systems to further enable autonomy research.
This flight was not autonomous and the goal was to simply verify avionics, high level processing, telemetry and the overall vehicle behavior. But autonomy is on its way! Below some further photos and a video of this first short flight.
 RSS Feed
RSS Feed