Frame Rotations and Representations
Euler Angles
|
Euler angles are a method to determine and represent the rotation of a body as expressed in a given coordinate frame. They are defined as three (chained) rotations relative to the three major axes of the coordinate frame. Euler angles are typically representes as phi (φ) for x-axis rotation, theta (θ) for y-axis rotation, and psi (ψ) for z-axis rotation. Any orientation can be described through a combination of these angles. Figure 1 represents the Euler angles for a multirotor aerial robot.
These elemental rotations can take place about the axes of the fixed coordinate frame (extrinsic rotations) or about the axes of a rotating coordinate frame (e.g. one attached on the vehicle), which is initially aligned with the fixed one, and modifies its orientation after each elemental rotation (intrinsic rotations). Without accounting the possibility of using two different conventions for the definition of the rotation axes (intrinsic or extrinsic), there exist twelve possible sequences of rotation axes, divided in two groups:
|
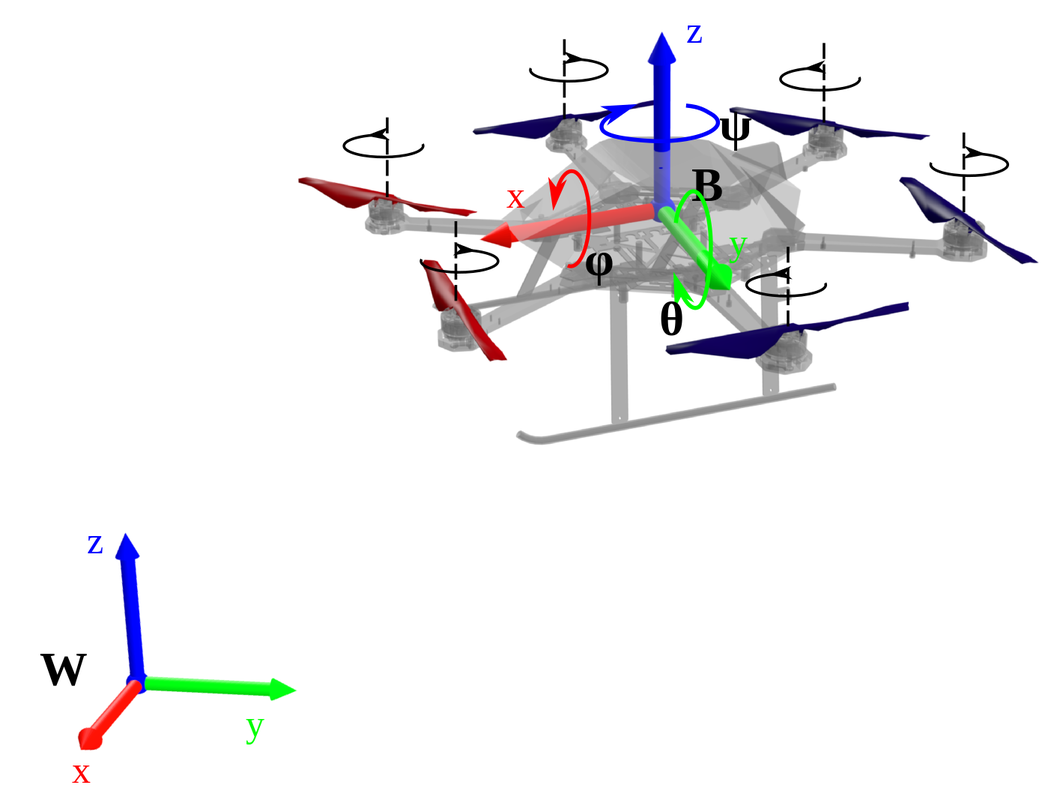
Figure 1: Euler angles represented for a multirotor aerial robot.
|
As seen there are many ways to do this set of rotations - with the variations be based on the order of rotations. All would be formally acceptable, but some are much more commonly used than others.
|
Among them, one that is particuarly widely used is the following: start with the body fixed-frame (attached on the vehicle) (x,y,z) aligned with the inertial frame (X,Y,Z), and then perform 3 rotations to re-orient the body frame.
Euler angles:
To learn more about different conventions, please visit:
|
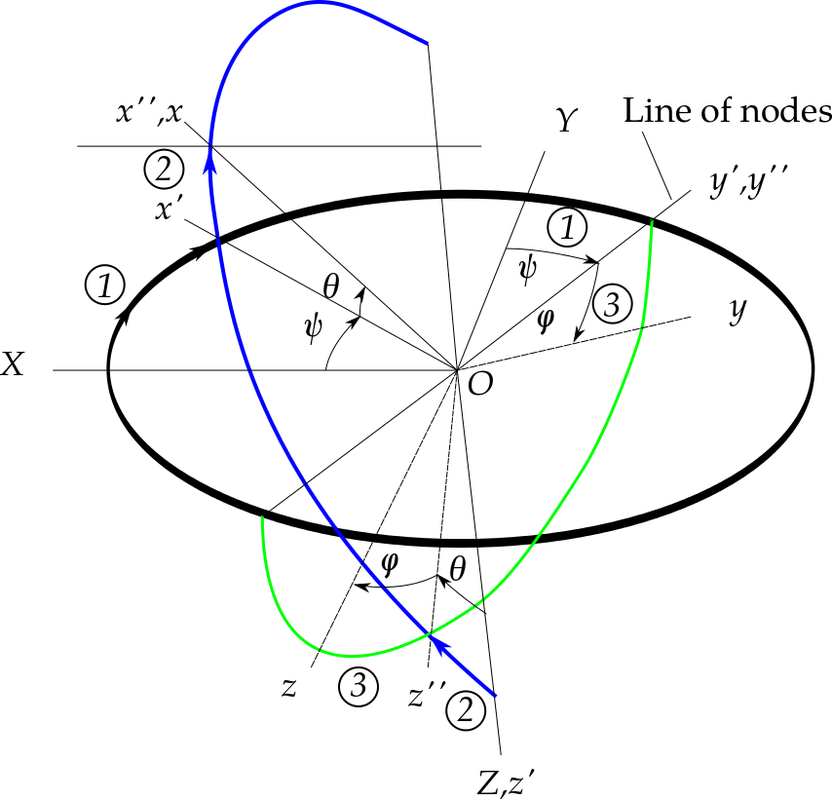
Figure 2: Representation of the Euler Angles.
|
We can write the aforementioned set of rotations as:
which combines to give:

To get the angular velocity, we will have to include three terms, namely the time derivative of ψ around Z, the time derivative of θ around y' and the time derivative of φ around x''. These three terms are combined to give the vector of angular velocities ω. The final result takes the form:
And in inverse form:
Note that one has to take care for singularities such as the pitch angle at plus/minus 90 degrees. A typical set of Euler Angles considers the following set of limitations:
Quaternions
Theorem by Euler states that any given sequence of rotations can be represented as a signle rotation about a single fixed axis. The concept of Quaternions provides a convenient parametrization of this effective axis and the rotation angle:
Notes:
||b¯||=1 abd thus there are only 3 degrees of freedom in this formulation, and- if
b¯ represents the rotational transformation from the reference frame (α ) to the frameb , the frameα is aligned with frameb if frameα is rotated byζ aboutE¯
This representation is connected with the Euler angles form, according to the following expression:

This representation has the great advantage of being:
- Singularity-free and
- Computationally efficient to do state propagation (typically within an Extended Kalman Filter)
Euler to-and-from Quaternions Python Implementation
File: QuatEulerMain.py
# __QUATEULERMAIN__ # This main file demonstrates functions for handling # and manipulating quaternios and Euler Angles # # Authors: # Kostas Alexis ([email protected]) from numpy import * import numpy as np from QuatEulerFunctions import * # demo values q_ = np.array([0.25,0.5,0.1,0.2]) print 'Quaternion: ' print q_ rpy_ = quat2rpy(q_) print 'Euler angles' print rpy_ quat_ = rpy2quat(rpy_) print 'Recovered quaternion:' print quat_ rot_ = quat2r(quat_) print 'Recovered rotation matrix:' print rot_ rpy_rec_ = r2rpy(rot_) print 'Recovered Euler' print rpy_rec_ q_norm_ = normalized(q_) print 'Normalized quaternion:' print q_norm_
File: QuatEulerFunctions.py
# __QUATEULERFUNCTIONS__ # This file implements functions for handling # and manipulating quaternios and Euler Angles # # Authors: # Kostas Alexis ([email protected]) from numpy import * import numpy as np def quat2r(q_AB=None): C_AB = np.zeros((3,3)) C_AB[0,0] = q_AB[0]*q_AB[0] - q_AB[1]*q_AB[1] - q_AB[2]*q_AB[2] + q_AB[3]*q_AB[3] C_AB[0,1] = q_AB[0]*q_AB[1]*2.0 + q_AB[2]*q_AB[3]*2.0 C_AB[0,2] = q_AB[0]*q_AB[2]*2.0 - q_AB[1]*q_AB[3]*2.0 C_AB[1,0] = q_AB[0]*q_AB[1]*2.0 - q_AB[2]*q_AB[3]*2.0 C_AB[1,1] = -q_AB[0]*q_AB[0] + q_AB[1]*q_AB[1] - q_AB[2]*q_AB[2] + q_AB[3]*q_AB[3] C_AB[1,2] = q_AB[0]*q_AB[3]*2.0 - q_AB[1]*q_AB[2]*2.0 C_AB[2,0] = q_AB[0]*q_AB[2]*2.0 + q_AB[1]*q_AB[3]*2.0 C_AB[2,1] = q_AB[0]*q_AB[3]*(-2.0) + q_AB[1]*q_AB[2]*2.0 C_AB[2,2] = -q_AB[0]*q_AB[0] - q_AB[1]*q_AB[1] + q_AB[2]*q_AB[2] + q_AB[3]*q_AB[3] return C_AB def quat2rpy(q_AB=None): C = quat2r(q_AB) theta = np.arcsin(-C[2,0]) phi = np.arctan2(C[2,1],C[2,2]) psi = np.arctan2(C[1,0],C[0,0]) rpy = np.zeros((3,1)) rpy[0] = phi rpy[1] = theta rpy[2] = psi return rpy def rpy2quat(rpy=None): r = rpy[0] p = rpy[1] y = rpy[2] cRh = np.cos(r/2) sRh = np.sin(r/2) cPh = np.cos(p/2) sPh = np.sin(p/2) cYh = np.cos(y/2) sYh = np.sin(y/2) qs_cmpl = np.array([ -(np.multiply(np.multiply(sRh,cPh),cYh) - np.multiply(np.multiply(cRh,sPh),sYh)), -(np.multiply(np.multiply(cRh,sPh),cYh) + np.multiply(np.multiply(sRh,cPh),sYh)), -(np.multiply(np.multiply(cRh,cPh),sYh) - np.multiply(np.multiply(sRh,sPh),cYh)), np.multiply(np.multiply(cRh,cPh),cYh) + np.multiply(np.multiply(sRh,sPh),sYh)]) qs = np.real(qs_cmpl) return qs def r2rpy(C=None): theta = np.arcsin(-C[2,0]) phi = np.arctan2(C[2,1],C[2,2]) psi = np.arctan2(C[1,0],C[0,0]) rpy = np.zeros((3,1)) rpy[0] = phi rpy[1] = theta rpy[2] = psi return rpy def normalized(x=None): y=x/np.sqrt(np.dot(x,x)) return y
Euler to-and-from Quaternions MATLAB Implementation
File: QuatEulerMain.m
% __QUATEULERMAIN__ % This main file demonstrates functions for handling % and manipulating quaternios and Euler Angles % % Authors: % Shehryar Khattak ([email protected]) %Clear Workspace and Command Window clear;clc; %Demo Quaternion value q = [0.25 0.5 0.1 0.2]; %Display Quaternion fprintf('\n --- Quaternion --- \n') disp(q'); %Normalize Quaternion q_norm=q/norm(q); fprintf('\n --- Normailized Quaternion --- \n'); disp(q_norm'); %Euler Angles eul_ang=quat2rpy(q); fprintf('\n --- Euler Angles --- \n') fprintf('Roll=%f\nPitch=%f\nYaw=%f\n',eul_ang(1),eul_ang(2),eul_ang(3)); %Recovered Quaternion q_rec=rpy2quat(eul_ang); fprintf('\n --- Recovered Quaternion --- \n') disp(q_rec'); %Rotation Matrix from Quaternion rot_m=quat2r(q_rec); fprintf('\n --- Rotation Matrix from Quaternion --- \n') disp(rot_m); %Recoverd Euler from Rotation Matrix rpy_rec=r2rpy(rot_m); fprintf('\n --- Recovered Euler Angles from Rotation Matrix --- \n'); fprintf('Roll=%f\nPitch=%f\nYaw=%f\n',rpy_rec(1),rpy_rec(2),rpy_rec(3));
File: quat2r.m
% __Quaternion to Rotation Matrix__ % % Authors: % Shehryar Khattak ([email protected]) % Reference: http://www.euclideanspace.com/maths/geometry/rotations/conversions/quaternionToMatrix/ %Convert Quaternion to Rotation Matrix function [r] = quat2r(q) %Check if vector and if have it has enough input values if ~isvector(q) || (length(q))~=4 error('Input to quat2r must be a vector and must have 4 values') end %Initialize r=zeros(3,3); %Normailize Quaternion before using q=q/norm(q); %Quaternion components qw=q(1); qx=q(2); qy=q(3); qz=q(4); %Rotation Matrix Elements r(1,1) = 1 - 2*qy^2 - 2*qz^2; r(1,2) = 2*qx*qy - 2*qz*qw; r(1,3) = 2*qx*qz + 2*qy*qw; r(2,1) = 2*qx*qy + 2*qz*qw; r(2,2) = 1 - 2*qx^2 - 2*qz^2; r(2,3) = 2*qy*qz - 2*qx*qw; r(3,1) = 2*qx*qz - 2*qy*qw; r(3,2) = 2*qy*qz + 2*qx*qw; r(3,3) = 1 - 2*qx^2 - 2*qy^2; %Equivalent built-in MATLAB function: quat2rotm end
File: quat2rpy.m
% __Quaternion to Euler Angles__ % % Authors: % Shehryar Khattak ([email protected]) % Reference: Beard, Randal W., and Timothy W. McLain. Small unmanned aircraft: Theory and practice. Princeton University Press, 2012. Appendix B, Page 259 %Convert Quaternion to Euler function [eul_ang] = quat2rpy(q) %Check if vector and if have it has enough input values if ~isvector(q) || (length(q))~=4 error('Input to quat2rpy must be a vector and must have 4 values') end %Normailize Quaternion before using q=q/norm(q); %Roll eul_ang(1) = atan2( (2*(q(1)*q(2)+(q(3)*q(4)))) , (q(1)^2+q(4)^2-q(2)^2-q(3)^2) ); %Pitch eul_ang(2) = asin( 2*((q(1)*q(3))-(q(2)*q(4))) ); %Yaw eul_ang(3) = atan2( (2*(q(1)*q(4)+(q(2)*q(3)))) , (q(1)^2+q(2)^2-q(3)^2-q(4)^2) ); %Equivalent built-in MATLAB function: quat2eul end
File: r2rpy.m
% __Rotation Matrix to Euler Angles__ % % Authors: % Shehryar Khattak ([email protected]) % Reference: http://nghiaho.com/?page_id=846 %Convert Rotation Matrix to Euler Angles function [eul_ang]=r2rpy(rot_m) %Check if matrix and if have it has enough input values if ~ismatrix(rot_m) || numel(rot_m)~=9 error('Input to r2rpy must be a 3x3 matrix') end eul_ang(1)=atan2(rot_m(3,2),rot_m(3,3)); %ro - roll eul_ang(2)=atan2(-rot_m(3,1),sqrt(rot_m(3,2)^2+rot_m(3,3)^2)); %theta - pitch eul_ang(3)=atan2(rot_m(2,1),rot_m(1,1)); %psi - yaw %Equivalent built-in MATLAB function: eul2rotm end
File: rpy2quat.m
% __Euler Angles to Quaternion__ % % Authors: % Shehryar Khattak ([email protected]) % Reference: Beard, Randal W., and Timothy W. McLain. Small unmanned aircraft: Theory and practice. Princeton University Press, 2012. Appendix B, Page 259 %Convert Euler anngles to Quaternion function [q]=rpy2quat(eul_ang) %Check if vector and if have it has enough input values if ~isvector(eul_ang) || (length(eul_ang))~=3 error('Input to eul_ang must be a vector and must have 3 values') end r=eul_ang(1)/2; p=eul_ang(2)/2; y=eul_ang(3)/2; q(1)= (cos(y)*cos(p)*cos(r)) + (sin(y)*sin(p)*sin(r)) ; q(2)= (cos(y)*cos(p)*sin(r)) - (sin(y)*sin(p)*cos(r)) ; q(3)= (cos(y)*sin(p)*cos(r)) + (sin(y)*cos(p)*sin(r)) ; q(4)= (sin(y)*cos(p)*cos(r)) - (cos(y)*sin(p)*sin(r)) ; %Equivalent built-in MATLAB function: eul2quat end